Standard
Webex Executive Commitee meeting – November 2020
- Project manager
- November 25, 2020
Due to Covid, Executive Commitee meeting was held in November by videoconference.

Due to Covid, Executive Commitee meeting was held in November by videoconference.
Due to Covid, Governing Board meeting was held in November by videoconference.
Authors: I. Sarandi, T. Linder, K.O. Arras, B. Leibe
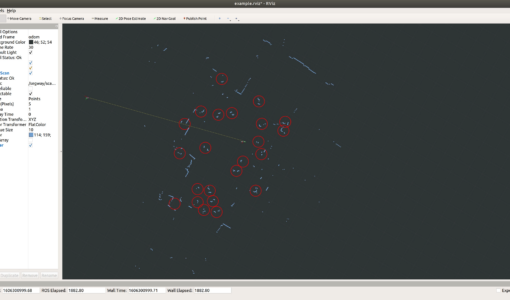
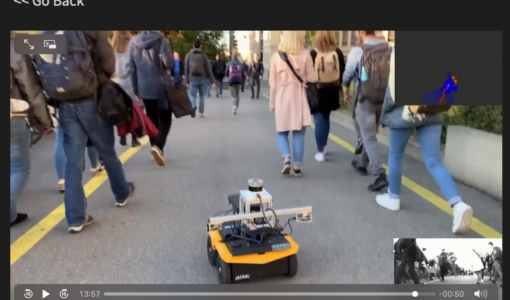
We are proud to announce that DR-SPAAM person detector of RWTH Aachen University developed in CrowdBot has been picked by NVidia as the « September Jetson Project of the Month » !

An article on CrowdBot was published in November 2020 on Thot Cursus.
Authors: Javad Amirian, Bingqing Zhang, Francisco Valente Castro, Juan Jose Baldelomar, Jean-Bernard Hayet, Julien Pettre

Authors: Dugas, Daniel; Nieto, Juan; Siegwart, Roland; Chung, Jen Jen
Authors: Liu, Lucia; Dugas, Daniel; Cesari, Gianluca; Siegwart, Roland; Dubé, Renaud
Authors: Jia, Dan; Hermans, Alexander; Leibe, Bastian

To learn more about CrowdBot’s progress, you can read the article just published on emergence in English or in French.