
We consider a modified Salsa M2 Quickie wheelchair platform augmented with sensors to create a smart wheelchair that is capable of shared control navigation. Our design considerations account for long range, proximity, and contact sensing to ensure the safety of the wheelchair user and nearby pedestrians.
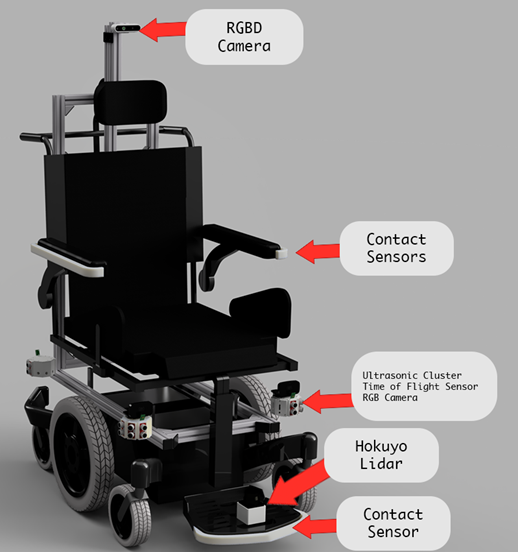
A 3D CAD model of the smart wheelchair (showing placement of the Hokuyo lidar, RGBD camera, bumper contact sensors, and ultrasonic clusters with time-of-flight sensors) is shown below (see figure below).
Long range sensing considerations
The smart wheelchair is fitted with a Hokuyo lidar and RGBD camera for long range sensing (greater than 30 cm). This allows the wheelchair to perceive the environment around it and later run modules for navigation and human detection/tracking. The lidar is securely mounted on the footrest whilst the RGBD camera is mounted onto a custom-built frame as shown in the 3D CAD model. The sensor frame, mounted on the rear of the wheelchair, is customisable and built using Item components.
| Sensor | Field of view | Design safety recommendation |
| Hokuyo URG-04LX-UG01 lidar | 270° | Long range detection of approaching obstacles |
| RealSense D435 RGBD camera | D: 87°x 58° RGB: 69.4° x 42.5° | Person detection and tracking |
Proximity sensing considerations
In addition to long range sensing, it is important for the smart wheelchair to be able to sense obstacles at close range (less than 30 cm). To achieve this objective, we use a combination of ultrasonic, lidar, time-of-flight, current, and RGB camera sensors.
| Sensor | Field of view | Design safety recommendation |
| Ultrasonic cluster 3 x SRF08 | 45° | Sense the distance of an approaching human leg (or other obstacle) |
| Time-of-flight VL53L1X | 27° | Sense sharp drops in front of the chair, e.g. stairs. |
| Current ACS758 | N/A | Indirect torque measurements detect main drive wheel going over foot/rock |
| RGB camera | 90° | Detect and classify an approaching (pedestrian) obstacle |
Contact sensing considerations
Contact sensing quantifies the nature of physical interactions between the wheelchair and a person. Figure 59 shows our early concept touch sensor mounted on the wheelchair’s footrest and on either exterior side of each armrest. These positions were identified (by our user studies and the simulation experiments) as having the greatest likelihood of both intentional and unintentional robot-pedestrian collisions.