Visual Perception
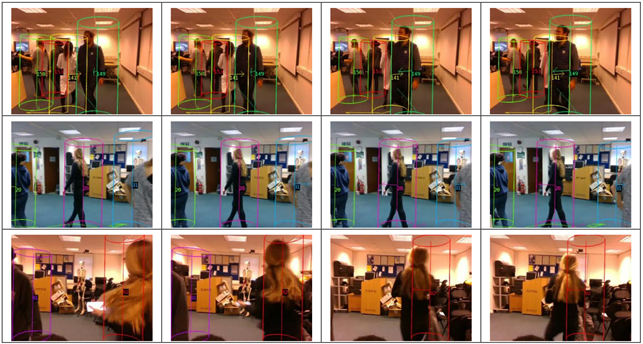
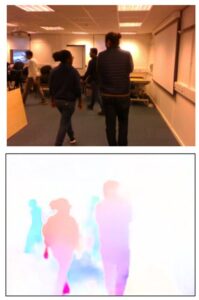
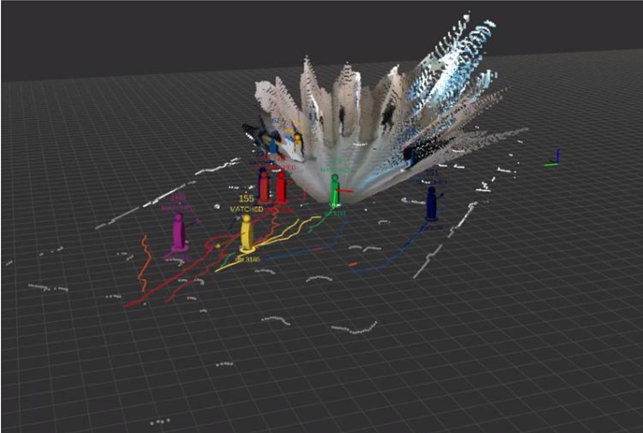
Our robots are equipped with RGB-D cameras, which provide them vision. We detect pedestrians using the rich information from images, and localize the pedestrians in 3D space using the measured depth. Advanced person analysis, including pose estimation and re-identification, is also carried out using image data.
Our perception pipeline is designed following the well-known tracking-by-detection paradigm. Under this paradigm, objects are detected for each frame independently, and a tracking algorithm is used to associate detections that belong to the same object instance over multiple frames.