
Deliverable 1.5: Second Round Test Evaluation Report
In this final deliverable of WP1, we discuss the second series of evaluations performed with each of our integrated Crowdbots: the smart wheelchair, Qolo, Pepper and cuyBot. The evaluations are both quantitative and qualitative and range from testing the efficacy of core components that are developed within the project and underpin the Crowdbots — namely:
New dataset: 3D point cloud and RGBD of pedestrians in robot crowd navigation: detection and tracking
This dataset contains over 250k frames of robot navigation in raw crowds in the city of Lausanne, Switzerland with the personal mobility robot Qolo in semi-autonomous navigation.
New dataset: Mobile robots crash testing with pedestrians (child and adult)
This dataset contains injury measures during collisions between a mobile service robot – Qolo – and pedestrian dummies: male adult Hybrid-III (H3) and child model 3-years-old (Q3).
Deliverable 5.4: Final integrated system also including simulation, crowd navigation for experimental scenario
Work package 5 (WP5) is about developing a coherent theoretical and functional system architecture that can accommodate the targeted scenarios and facilitate the integration of the different work packages across all four robotic platforms. However, this process must be iterative and reviewable after each milestone so that the achievement of such objectives is guaranteed during
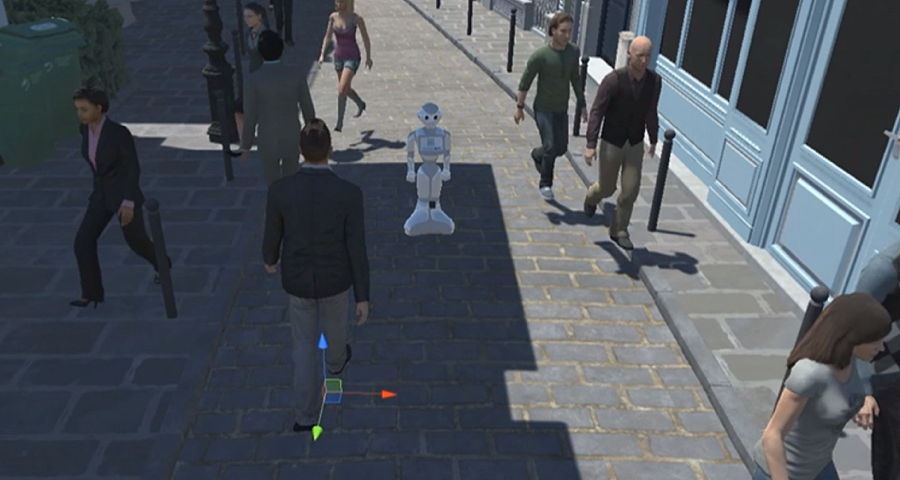
Deliverable 4.3: Crowd simulator – final version
This report details the crowd simulation software and tools that were developed for the CrowdBot project and presents their last version reached at the end of the project, up to month M42. The development of the crowd simulation tools was mainly performed in the frame of Workpackage 4 of the project. The simulation tools for
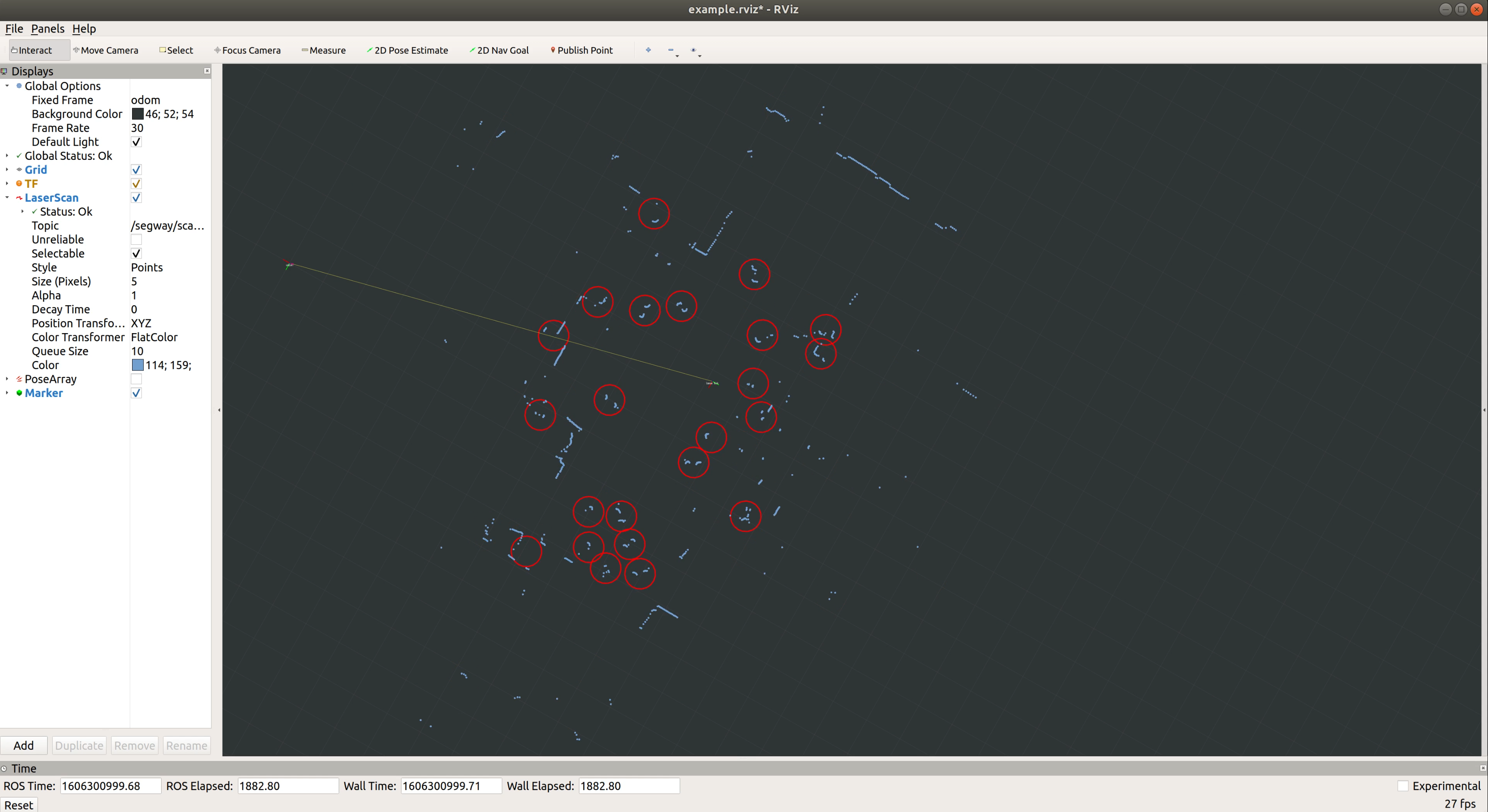
Deliverable 2.3: Local sensing system
In this report we describe the development in the perception pipeline, which is crucial towards safe robotic navigation. In Section 2, we briefly recap the previous pipeline, composed of multi-modal (RGB cameras and LiDAR sensors) person detection and joint tracking in a unified world coordinate system, and we present an overview of the updated components.
Deliverable 3.6: Shared control navigation
Work Package 3 of the CrowdBot project focuses on navigation. Half of our prototype crowdbots (Pepper and cuyBot) are designed to be fully autonomous and so the navigation algorithm must deal with both global and local aspects of planning. However, the other two crowdbots (smart wheelchair and Qolo) are designed to support human users improving

Webex All-hands & ExCom meeting – June 2021
An All-hands meeting was held by videoconference with all partners on 14 and 15 June 2021.
Autonomy Talks: Safe Robot Navigation in Dense Human Crowds
Today, we were organising as part of the CrowdBot project a roundtable discussion about Shared control wheelchair.

Webex Executive Commitee meeting – March 2021
Like for a year now, an ExCom meeting was held in March 2021 by videoconference with all partners.
Deliverable 6.3: Proceedings of ESAB Workshops & Report on Ethical Protocols
This report reports on the ethical protocols developed and followed during the CROWDBOT project and on all ethical and safety advisory board (ESAB) meetings held throughout the project. The ESAB served as a committee. We report here on the opinions of several experts as a group. After these meetings, we organized an international workshop to
Shared control wheelchair roundtable discussion
Today, we were organising as part of the CrowdBot project a roundtable discussion about Shared control wheelchair.

Webex All-hands & ExCom meeting – January 2021
Due to Covid, All-hand meeting was held in January by videoconference.
6-month extension of the CrowdBot project
Because of the health situation at Covid-19 and the lack of crowds. CrowdBot is extended for another 6 months. It will therefore finally end in December 2021.
DR-SPAAM person detector awarded !
We are proud to announce that DR-SPAAM person detector of RWTH Aachen University developed in CrowdBot has been picked by NVidia as the « September Jetson Project of the Month » !
We are talking about CrowdBot in France!
An article on CrowdBot was published in November 2020 on Thot Cursus.
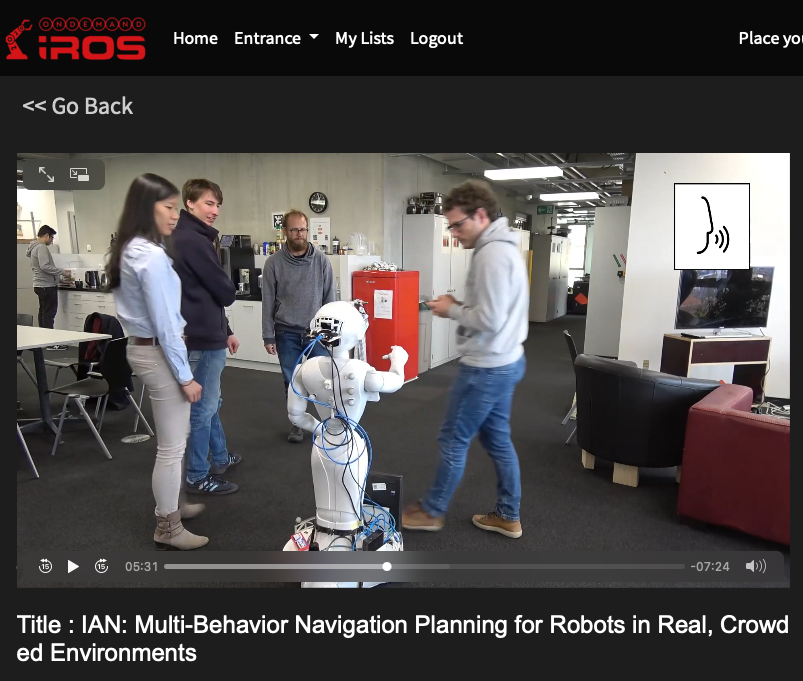
Publication (IROS 2020): IAN: Multi-Behavior Navigation Planning for Robots in Real, Crowded Environments
Authors: Dugas, Daniel; Nieto, Juan; Siegwart, Roland; Chung, Jen Jen
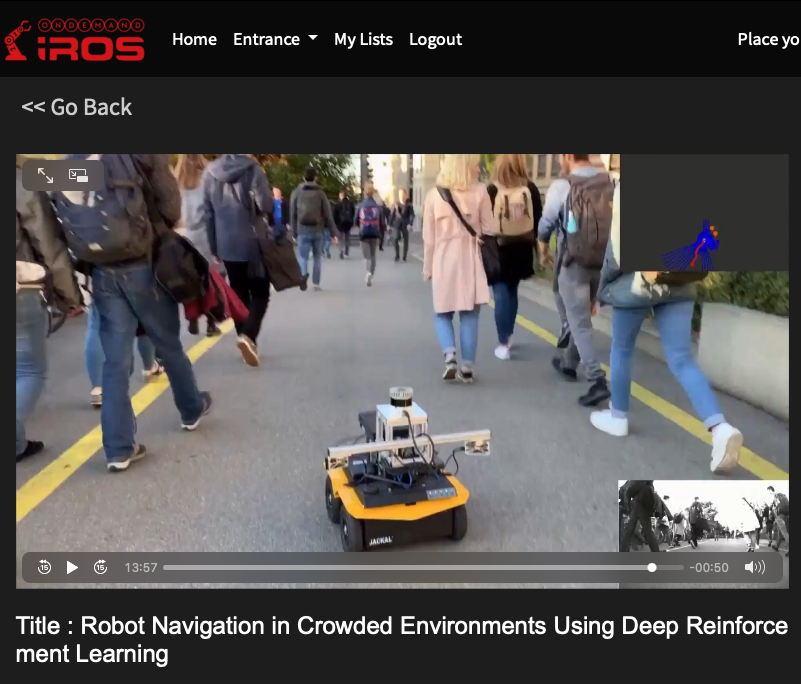
Publication (IROS 2020): Robot Navigation in Crowded Environments Using Deep Reinforcement Learning
Authors: Liu, Lucia; Dugas, Daniel; Cesari, Gianluca; Siegwart, Roland; Dubé, Renaud

An article on INRIA website!
To learn more about CrowdBot’s progress, you can read the article just published on emergence in English or in French.

Talk (CYBATHLON 2020): Materializing Personal Standing Mobility from Design to Shared Control
Authors: Paez-granados, D.; Billard, A.; & Suzuki, K.

Webex Second Review – September 2020
Due to Covid crisis, the second review of the CrowdBot project was held in September by videoconference. It was an opportunity to present the project’s progress to the reviewers and to the project officer.

Workshop (RO-MAN 2020): Robots from Pathways to Crowds
Diego Paez-Granados, Pericle Salvini, Aude Billard, Julien Pettre and Tom Carlson from CrowdBot project organised the Workshop on 31 August 2020: Robots from Pathways to Crowds. All information about this Workshop is available on this page.
Deliverable 3.4: Reactive Motion Planning
This report details the reactive navigation techniques developed for the CrowdBot project between months M1 to M30. In this sense, we have investigated three main technical components for achieving reactivity in different types of mobile or service robots when navigating in crowded environments.Each of the three technical components are designed to complement high-level planning techniques
Deliverable 3.5: Social Navigation
This task brings socially aware navigation strategies on the commercial platform Pepper. Special focus was put on the factors: Safety: No physical harm. Comfort: Absence of annoyance and stress for humans. Naturalness: Similarity between robots and human’s behaviour patterns. Sociability: Adherence to explicit high-level socio-cultural conventions. This deliverable reports on the developments made by Softbank
Deliverable 3.2: Robust Localization and Mapping
This report details the robust localization and mapping algorithms developed for the Crowdbot project between months M1 and M30. Our proposed solutions are designed with the explicit goal of achieving robot navigation in crowded environments, where many existing methods struggle due to the high degree of dynamic motion around the robot. This report primarily serves
Deliverable 3.3: Local Interaction Aware Motion Planning
State-of-the-art approaches for robot navigation among humans are typically restricted to planar movement actions. This work addresses the question of whether it can be beneficial to use interaction actions, such as saying, touching, and gesturing, for the sake of allowing robots to navigate in unstructured, crowded environments. To do so, we first identify challenging scenarios

New article on the SoftBank Robotics blog
SoftBank Robotics (SBR) blog is a place where SBR collaborators share their vision about robotics, AI, Machine Learning or creative content and animation among others hot technological and scientific topics.
Deliverable 7.3: CrowdBot Challenge
This deliverable introduces the CrowdBot Challenge and presents its level of advancement before launching the first round. This document first presents the objective of the challenge, which is, in brief, to allow teams working in the field of crowd robot navigation to evaluate their navigation techniques and to compare their methods for moving robots in
Deliverable 5.3: 2nd Updated and Extended Robot System
Work package 5 (WP5) is about developing a coherent theoretical and functional system architecture that can accommodate the targeted scenarios and facilitate the integration of the different work packages across all three robotic platforms. However, this process must be iterative and reviewable after each milestone so that the achievement of such objectives is guaranteed during
Deliverable 1.3: Specification of Scenarios Requirement Update
Deliverable D1.3 is an updated version of D1.1. To enable the reader to have a complete understanding of the document without need to refer to previous ones, some existing portions have been reported here, even though they did not experiment a major update. To clarify things, for each section, a similar orange text box provides

Second round for experiments in Virtual Reality at INRIA Rennes
Today, it’s the second round for common experimentation at @INRIA_Rennes between the H2020 @CrowdbotP project and the ANR Opmops project. 5 additional participants today to complete the data set.
Deliverable 1.4: 1st Round Test Evaluation Report
In this deliverable we present the results of the first-round evaluations of all our crowdbots (Pepper, the smart wheelchair, cuyBot and Qolo). The evaluations are both quantitative and qualitative. They range from testing the efficacy of core components that are developed within the project and underpin the Crowdbots (e.g. sensing, localisation, simulation, planning), to fully

Experiments in Virtual Reality at INRIA Rennes
Common experimentation at @INRIA_Rennes between the H2020 @CrowdbotP project and the ANR Opmops project. 20 participants planned over 4 days.

Demonstrations at Lausanne – January 2020
Demonstration of virtual reality simulation and the use of the new Qolo robot equipped with an obstacle avoidance system.
All-hands meeting at Lausanne – January 2020
CrowdBot All-hands meeting was hosted at EPFL Lausanne in January, 2020.

Open session at Lausanne – January 2020
During the CrowdBot project meeting, three speakers from EPFL presented their work for cross-exchanges with CrowdBot partners.

UCL: Smart weelchair experiment
This week (December 25-29, 2019), UCL is collecting crowd data from smart wheelchair as part of the CrowdBot project. For this purpose, they use a RGB camera, a lidar and ultrasonic sensors.

Open session at UCL London – November 2019
Julien Pettre (INRIA) presented his work during his visit to UCL. His presentation was entitled: Velocity-based algorithms for crowd simulation.
Deliverable 2.2: Local Sensing 1st Prototype
In this report we present our first prototype of the perception pipeline developed for the CROWDBOT project. Currently, the focus of the perception pipeline is on detecting and tracking pedestrians in low to medium density scenarios using RGB-D cameras and 2D LiDAR sensors. We begin with reviewing the major detection and tracking methods used in
Deliverable 4.2: Crowd Simulator – Intermediate Version
The CrowdBot project’s crowd simulators perform two essential roles for the safe navigation of robots in populated environments: Crowd simulation for short-term prediction of the evolution of the situation of people in the vicinity of the robot. Crowd simulation for testing and evaluating the navigation functions of a robot in a densely populated environment. This
Deliverable 3.1: 1st Release of Localization, Mapping & Local Motion Planning
This report details the mapping, localisation and path planning solutions developed for the CROWDBOT project between months M1 to M20. Each of the three technical components have been designed with the explicit goal of achieving robot navigation in crowded environments, where many existing methods struggle due to the high degree of dynamic motion around the

All-hands meeting at Zurich – June 2019
CrowdBot All-hands meeting was hosted at ETH Zürich in June, 2019.

Demonstrations at SIDO 2019
CrowdBot presents its VR simulator on the INRIA stand at SIDO 2019 in Lyon on 10th and 11th April 2019. For more informations on SIDO, click here.
Deliverable 6.1: Overview of Risks When Using Robots in Crowds
This document aims at identifying risks that may arise when a robot navigates through a crowd and to provide a preliminary set of tools for identifying and evaluating potential physical hazards deriving from interaction with crowdbots. For the scope of this document, we define crowdbots as mobile robots operating in public, densely populated spaces, capable
Deliverable 1.2: Experiment Protocol and Risk Assessment
As part of external stakeholder engagements, two types of experiments ─ user studies and robotic tests ─ are planned for the Crowdbot project. User studies are further classified as structured interviews and focus group engagements. Both user study experiments will be used to collect information and better understand the viewpoints and concerns of various stakeholders
Deliverable 5.2: First Basic Integrated Robot System Prototype in Experimental Scenario
Work package 5 (WP5) is about developing about a coherent theoretical and functional system architecture that can accommodate the targeted scenarios and facilitate the integration of the different work packages across all three robotic platforms. However, this process must be iterative and reviewable after each milestone so that the achievement of such objectives is guaranteed
Deliverable 1.1: Specification of Scenarios Requirements
Scenarios are descriptors that portray use cases and operational procedures of mobile robots in human crowd environments such as hospitals, shopping malls, train stations and other public or private venues. Nowadays we are witnessing the presence of robots in both public and private places but their efficacy and technological features are rather modest due to
Deliverable 4.1: Physical Interactions between Robots & Humans
The CROWDBOT project aims for tight navigation of mobile robots in a dense crowd and thus physical interaction (both contact and non-contact) between a robot and human crowd is anticipated. This report addresses our approach for modeling, analysis and experimentation of robot-human physical interaction. Here the term “physical” means that a robot will come close
Deliverable 2.1: Sensor Specification
The main objective of the Crowdbot project is safe navigation of mobile robots in a dense human crowd environment. Both terms “safe” and “navigation” carry equal weight in achieving milestones and the overall success of the project. Sensors play a critical role for both safe operation and intelligent navigation of Crowdbot robots. This report provides
Deliverable 7.2: Dissemination Plan
The main objective of the CROWDBOT project is to demonstrate safe navigation of mobile robots in dense human crowd environments. There are both technical challenges and ethical concerns that must be addressed during the execution of this goal. While the team is devising new technical solutions and engaging with stakeholders on ethical concerns, it is
Deliverable 5.1: System Architecture
The main objective of the CROWDBOT project is safe navigation of mobile robots in dense crowds. Operating a robot safely in a social setting requires overcoming current technical limitations and acquiring human-like intelligence as well as addressing ethical and safety concerns of machines co-existing among human crowds. The scope of this report is limited to
Deliverable 7.1: Project Website
For the project period spanning from 1 January 2018 to Jun 30 2021, the CROWDBOT team will manage and maintain two web sites, one for public access and another as internal document repository. The “public” website will be the main information portal and the basis for communicating over social networks. Developed by INRIA, both of

Kick off meeting at Paris – February 2018
That’s it, let’s go! The CrowdBot project is officially started.