Workpackages
WP1: Scenarios co-design and evaluation
The main objectives of this WP are to define the crowd scenarios in which the smart wheelchair and the socially assistive robot Pepper will operate and to prepare, run and evaluate the user studies.
WP2: Sensing
This WP focuses on providing the visual sensing capabilities for assisting a mobile robot or wheelchair in its challenging task of navigating through a crowd.
WP3: Navigation
This WP focuses on the central task of safe autonomous navigation among human crowds.
WP4: Simulation tools for robots navigation in crowds
The main objective of this WP is to use crowd simulation techniques to provide robots with the capacity of predicting short term evolution of the crowd state around the robot and, consequently, to improve the ability of robots to navigate in crowds
WP5: System architecture and integration
The main objective of this WP is to develop a coherent theoretical and functional system architecture fitting the needs of the project, including targeted scenarios and facilitating integration of components across robotic platforms
WP6: Ethics and sefety
This work-package addresses the safety and ethical questions related to the use of robots in crowds.
WP7: Exploitation, dissemination, communication
The main objective of this WP is to generate awareness by developing appropriate communication messages, material and initiatives targeting our key audiences.
WP8: Management
This WP ensures the achievement of the project’s objectives, in terms of scientific quality, timely delivery, and contribution to the expected impact of the project.
Deliverables
- D1.1: Specification of Scenarios Requirements
- D1.2: Experiment protocol and risk assessment
- D1.3: Specification update
- D1.4: Initial evaluation report
- D1.5: Final evaluation report
- D2.1: Sensor specification
- D2.2: Local sensing first prototype
- D2.3: Local sensing system
- D3.1: First release of the localization, mapping and local motion planning
- D3.2: Robust localization and mapping
- D3.3: Local interaction-aware motion planning
- D3.4: Reactive motion planning
- D3.5: Social navigation
- D3.6: Shared control navigation
- D4.1: Report on physical interactions between robots and humans
- D4.2: Crowd simulator - intermediate version
- D4.3: Crowd simulator - final version
- D5.1: System architecture
- D5.2: First basic integrated robot system prototype in experimental scenario
- D5.3: Second updated and extended integrated robot system with smart environment sensory communication and situation assessment capability for experimental scenario
- D5.4: Final integrated system also including simulation, crowd navigation for experimental scenario
- D6.1: Overview of risks when using robots in crowds
- D6.2: Robot design recommendations
- D6.3: Proceedings of ESAB workshops and report on ethical protocols
- D6.4: Roadmap towards standardization and certification
- D7.1: Project website
- D7.2: Initial Communication, dissemination and exploitation plan
- D7.3: CROWDBOT challenge
- D7.4: Final exploitation plan beyond project
- D8.1: Project quality plan & private web platform
- D8.2: Data management plan
- D9.1: Protection of Personal Data
- D9.2: Ethics Perception Questionnaire n°2
Reminder: Deliverables D6.2, D6.4, D7.4, D8.1, D8.2, D9.1 and D9.2 are not public.
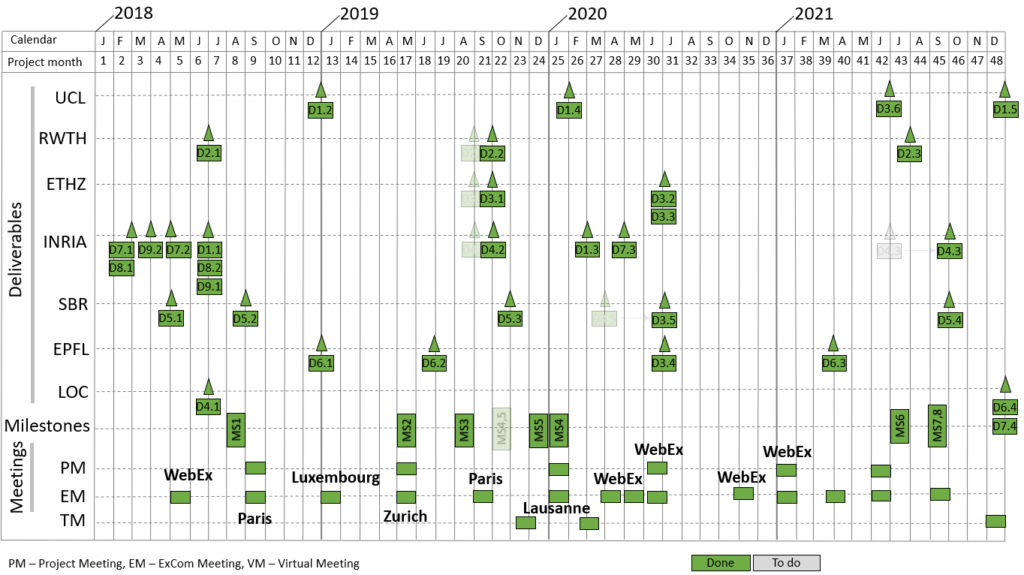
Gantt