
This article has been published in Robotics Science and Systems (RSS-2021) – Workshop on Social Robot Navigation.
Abstract
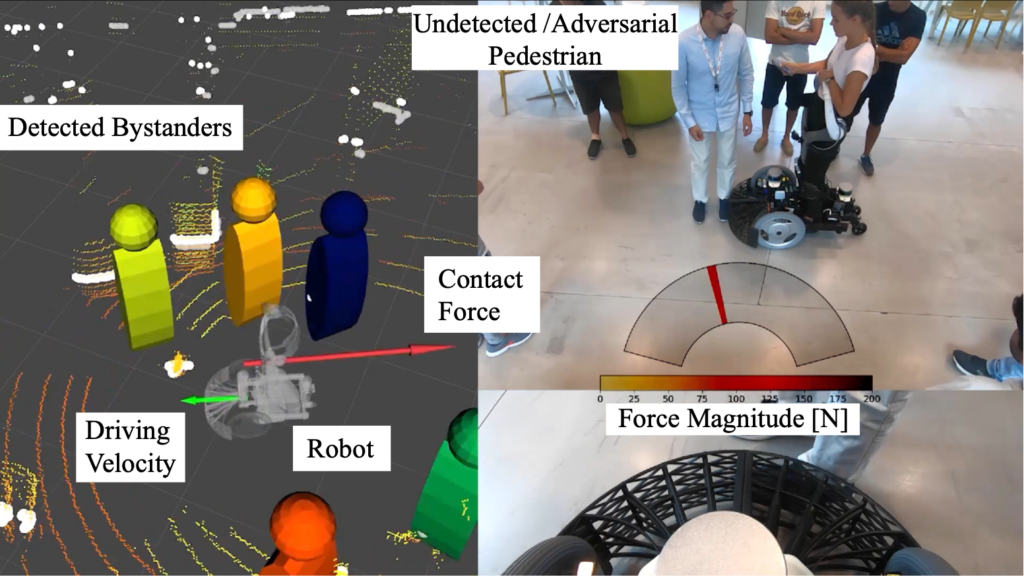
Soon human-robot interactions in pedestrian areas will be beyond the novelty effect with the deployment of delivery robots, autonomous personal mobility vehicles, and surveillance robots. Proxemics and other social rules guide these interactions, nonetheless, contactless navigation might be yielded infeasible by pedestrian density in certain areas or by adversarial pedestrians. In such scenarios, freezing the robot might go against bystanders safety and task completion might only be feasible under controlled contact interactions. We present a force-limited and obstacle avoidance integrated controller through a time-invariant dynamical system in a closed-loop force controller that let the robot react instantaneously and drive around pedestrians. Mitigating the risk of collision is done by modulating the velocity commands upon detecting a pedestrian and absorbing part of the contact force through active compliant control when the robot bumps inadvertently against the pedestrian.
Details
- Title: Unfreezing Social Navigation : Dynamical Systems based Compliance for Contact Control in Robot Navigation
- Authors: D. Paez-Granados, V. Gupta, A. Billard
- Date of publication: 13/07/2021
- View article